# Visual Inverse Trig and atan2 Without Math Libraries
## Plain English first
Regular trig starts with an angle and gives you a point.
**Inverse trig goes the other direction**: you have a point and you want the angle.
Imagine you know where something is on screen — you have its x and y position. Inverse trig tells you the angle you'd need to face to look directly at it.
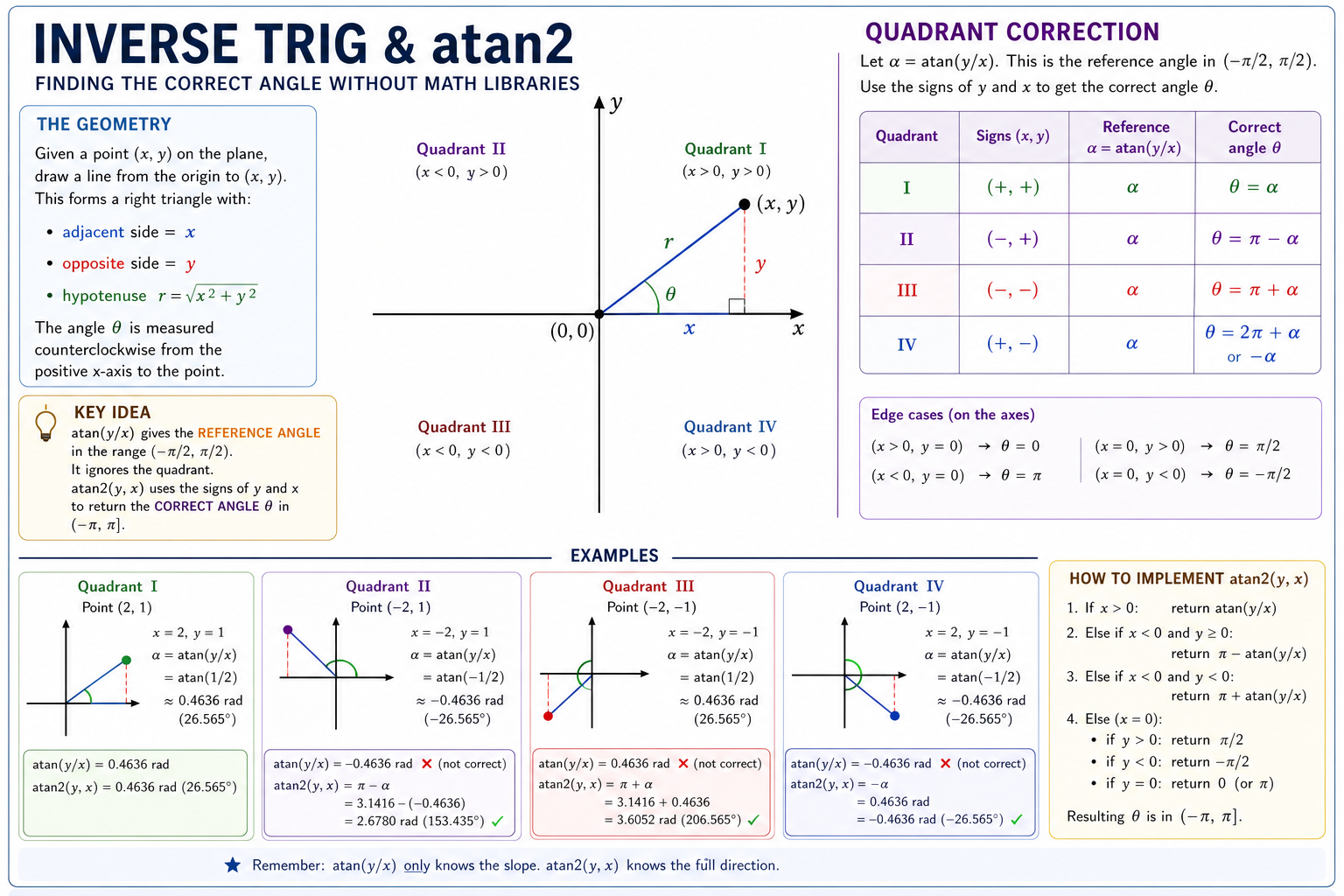
## The picture
Given a point `(x, y)`, draw an arrow from the origin to the point. The angle `θ` is measured from the positive x-axis (pointing right) counterclockwise to your arrow.
```text
y
| * (x, y)
| /
| / ← θ is this angle
|/_________ x
```
## Standard math notation
```text
θ = arctan(y / x) ← basic, loses quadrant info
θ = atan2(y, x) ← correct, uses both signs
```
## Why atan2 exists
`arctan(y/x)` has a problem: the same ratio can come from two opposite quadrants.
For example, `(-3, -4)` and `(3, 4)` both give `y/x = -4/-3 = 4/3`. But they point in completely opposite directions.
`atan2(y, x)` fixes this by looking at the **signs** of x and y separately.
## Verbose Python with descriptive names
```python
def find_angle_from_point(x_coordinate, y_coordinate):
"""
Given a point at (x, y), find the angle in radians from
the positive x-axis to the arrow pointing at that point.
Uses atan2 logic to correctly handle all four quadrants.
Returns an angle between -π and +π radians (-180° to 180°).
"""
# Handle the special case where the point is at the origin
if x_coordinate == 0 and y_coordinate == 0:
return 0 # no direction defined
# Use the basic arctangent for the magnitude of the angle
if x_coordinate != 0:
basic_angle = arctangent_approximation(y_coordinate / x_coordinate)
else:
# Pointing straight up or down
PI = 3.141592653589793
return PI / 2 if y_coordinate > 0 else -PI / 2
PI = 3.141592653589793
# Adjust the quadrant based on signs of x and y
if x_coordinate > 0:
# Quadrant I (x+, y+) or Quadrant IV (x+, y-)
# basic_angle is already correct
final_angle = basic_angle
elif x_coordinate < 0 and y_coordinate >= 0:
# Quadrant II: x is negative, y is positive or zero
# The basic angle is negative here; add π to flip to correct side
final_angle = basic_angle + PI
else:
# Quadrant III: x is negative, y is negative
# Subtract π to get the correct negative angle
final_angle = basic_angle - PI
return final_angle
def angle_to_degrees(angle_in_radians):
PI = 3.141592653589793
return angle_in_radians * 180 / PI
```
## Worked example
```python
# Enemy is at position (3, 4). You are at origin. What angle do you face?
enemy_x = 3
enemy_y = 4
angle_radians = find_angle_from_point(enemy_x, enemy_y)
angle_degrees = angle_to_degrees(angle_radians)
# angle_degrees ≈ 53.1°
# Same for the opposite direction:
angle_radians = find_angle_from_point(-3, -4)
angle_degrees = angle_to_degrees(angle_radians)
# angle_degrees ≈ -126.9° ← correctly in Quadrant III
```
## Common mistakes
- Using `atan(y/x)` instead of `atan2(y, x)` — you lose quadrant information and get wrong angles half the time.
- Forgetting that `atan2` takes `(y, x)` order, not `(x, y)`. The y comes first in almost every language.
- Not handling `x == 0` before dividing — causes division by zero.
## See also
- [Visual Tangent Without Math Libraries](/articles/79e757c8-e0c8-44b1-b6ad-07587c459af5)
- [Visual Unit Circle Sine and Cosine Without Math Libraries](/articles/ad8e2329-c2a5-4f28-a4fb-251496ff9069)
- [Visual Angle Wrapping](/articles/0acc962a-66da-4990-8014-8fd781b9de25)
- [Visual Geometry and Trigonometry — Table of Contents](/articles/6e6fe0ba-ee87-48bd-9734-6fc7196323ac)